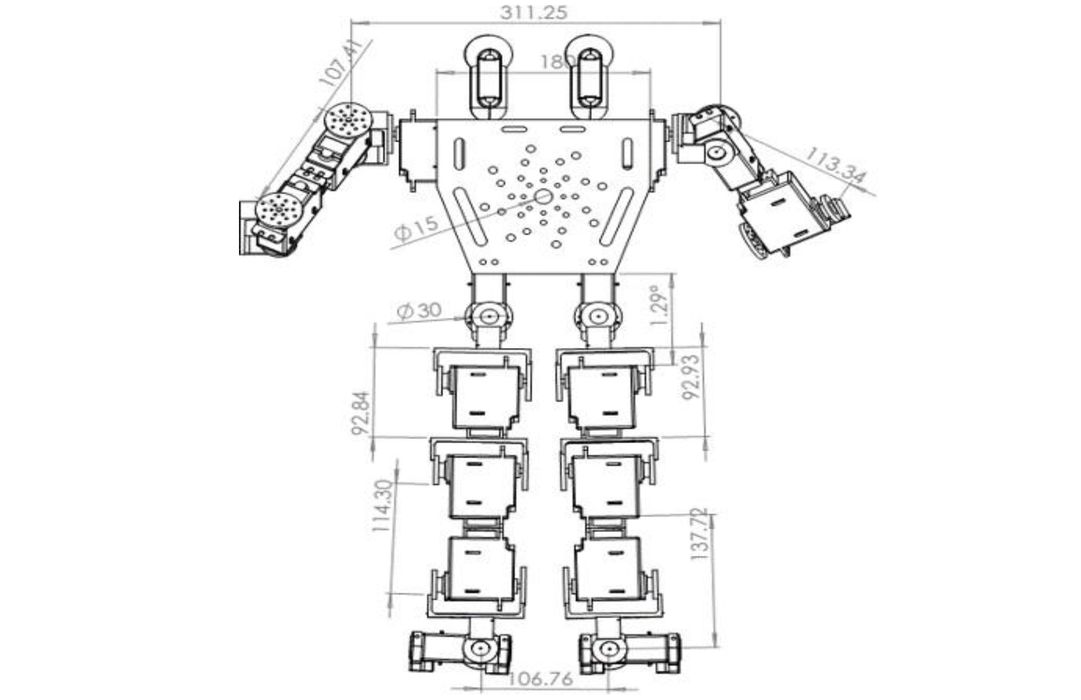
• A new paper outlines a unified, simulation-first pipeline that validates a lightweight, 3D printed 14 DOF humanoid before any plastic touches a heated bed. • Humanoid platforms are expensive to prototype, which is why low-cost additive builds keep drawing labs and student teams. • The catch is that thermoplastics like PLA trade machining cost for stiffness, creep resistance, and fastener strength, especially under dynamic gait loads. • The authors of this study try to fill that gap with a single workflow: extract geometry and inertial properties from a full CAD assembly, run finite element analysis (FEA) for worst-case loading, derive torques with Euler-Lagrange dynamics, generate smooth joint trajectories, and validate motion with MATLAB and CoppeliaSim before committing to hardware design. • The approach targets the FFF process using PLA for a compact torso, pelvis, and 3 DOF per leg in the sagittal plane, plus 3 DOF per arm for expressive motion. • The design bakes in AM-conscious features - controlled wall thickness, internal ribs, and reinforced joint housings - to counter PLA’s low yield strength relative to metals and engineered polymers.
Article Summaries:
- A recent study presents a simulation‑first pipeline that validates a lightweight, 3‑D‑printed humanoid robot with 14 degrees of freedom before any part is printed. The workflow extracts geometry and inertial data from a full CAD assembly, runs finite‑element analysis on a conservative 1 kN static load, derives joint torques via Euler-Lagrange dynamics, and generates smooth cubic‑polynomial trajectories. The design targets FFF printing in PLA, incorporating controlled wall thickness, internal ribs, and reinforced housings to counter PLA’s low yield strength. While the approach links CAD, dynamics, and control to reduce rework, the paper notes gaps in printer parameters and real‑world material behavior, suggesting future hardware trials and material‑cycle studies.
Sources: